支持產品的自主化和智能化


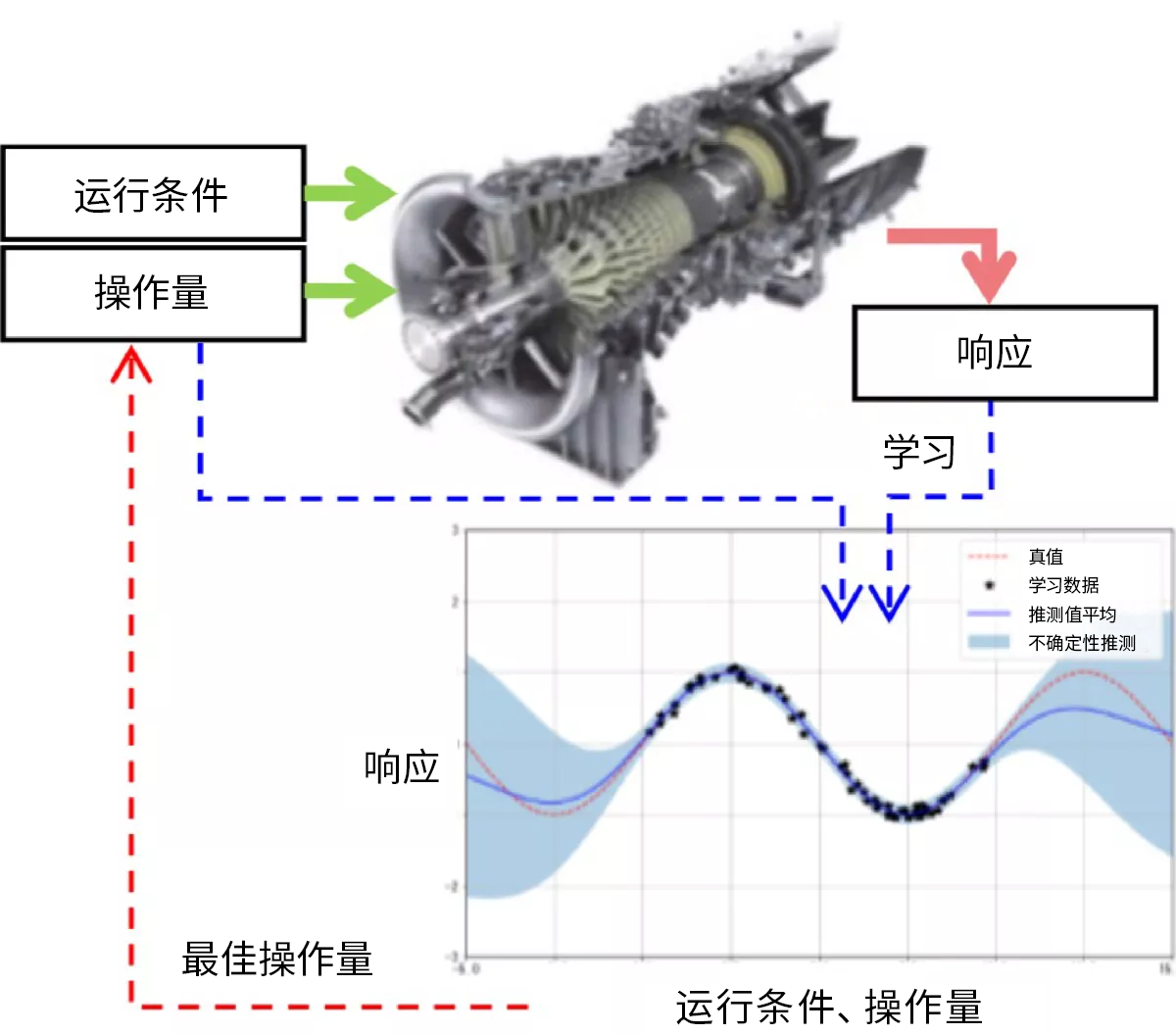
發電用燃氣輪機類似于燃燒振動,具有在設計階段難以事先正確預測的特性以及效率等經時變化的特性。另一方面,為了實現高運轉率、可靠性及高效運行,需要對此類難以預測的特性進行高度控制。
作為其實現手段,正在開發應用機器學習的控制方法。具體是指應用高斯過程回歸計算不確定性推測,實現了①通過燃料系統燃料的分配控制避免燃燒振動,以及②切實保護轉子不受高溫燃燒氣體影響而使效率最大化的透平冷卻空氣控制的實用化。
由于叉車事故容易引起重大事故,因此必須切實識別周圍環境以確保安全。但是,駕駛室被門架及配重等遮住視線,產生了多個死角。即使配置了后視鏡和攝像頭等用來消除死角,但是要求駕駛員時刻保持警惕并非易事。
為了幫助駕駛員確認周圍環境,開發了一種通過深層學習后,從配置在車輛附近的攝像頭影像中實時自動檢測人體的技術。此外,還開發了安裝在車載用GPU上向駕駛員發出警告的報警系統。


迄今為止,本公司已推出了“Urashima”、“Jinbei”、“Yumeiruka”等海底資源勘探用AUV。以往在更靠近海底的低高度及低速帶的詳細勘探操作中,一直由載人潛水器HOV和遙控無人潛水器ROV實施,但由于附帶設備龐大、熟練度要求高的問題,低速和低高度運行AUV的需求不斷增多,為此我們開發了實現低速和低高度運行AUV的自主控制技術。

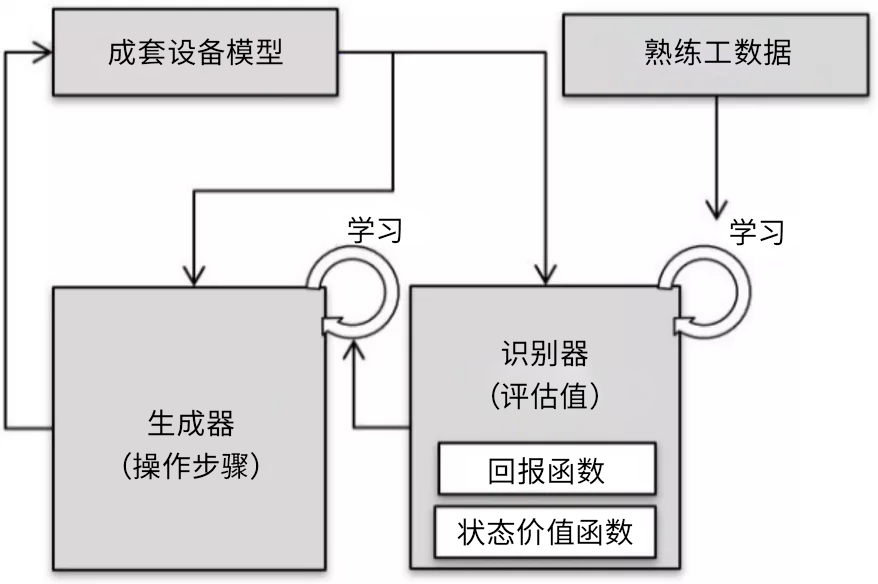
工廠的非常規手動操作需要根據運行狀態做出判斷,很大程度上依賴于操作員的知識和技能。
我們著眼可通過學習熟練工的操作數據自動完成熟練工的操作,并可推測熟練工操作方式(專業知識)的逆強化學習。其中,相較傳統的逆強化學習,可以掌握更復雜的操作,通過應用融入了深度學習技術后生成對抗網絡的逆強化學習方法,開發了可以學習熟練工人工作方式的設備操作步驟,并可推測操作方式的技術。
此外,已將本項技術應用于學習熟練飛行員駕駛飛機的操作,并積極推進運行訓練的應用。

近年來,隨著環境問題在全球范圍內引起關注,環保型交通系統備受關注。本公司提供膠輪式新交通系統AGT(Automated
Guideway Transit)及鐵輪式LRT(Light Rail
Transit)等安全舒適的陸運交通系統。由于此類鐵路系統的軌道形狀、運行條件、列車組數、電力系統和信號系統等條件因客戶路線而異,為了快速應對客戶的要求,提供確保運輸量且適當的系統配置方案,事先進行細致的模擬試驗是不可或缺的。
在上述背景下,開發了提高鐵路系統設計效率的綜合模擬器。

